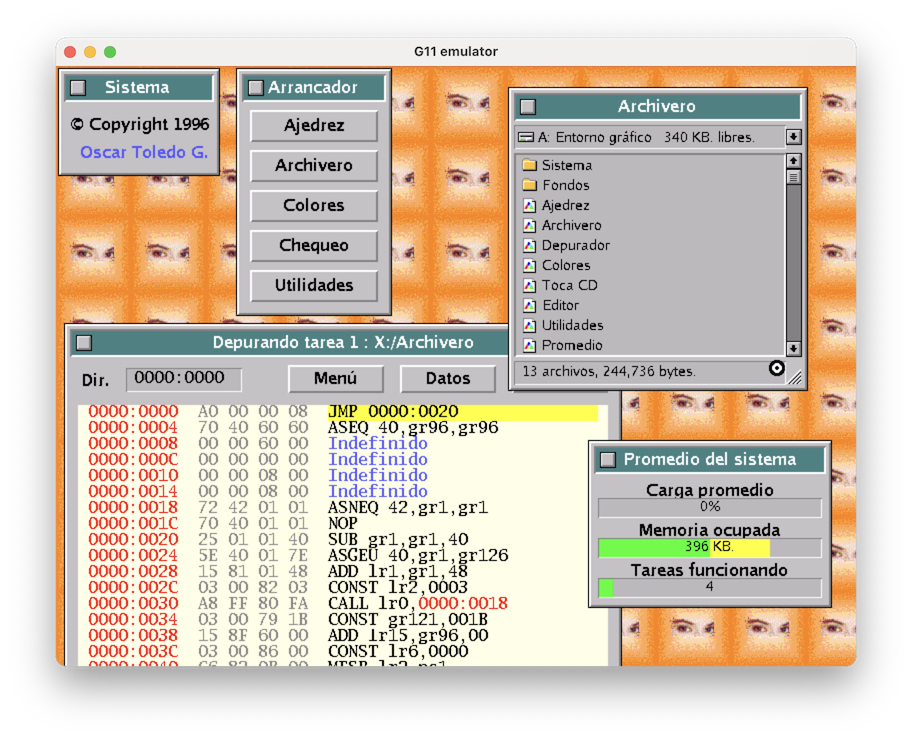
 1996 年至 1998 年间,奥斯卡·托莱多(Oscar Toledo G.)开发了“Windows Fénix”,这是一个完全用机器码为 AMD Am29000 处理器编写的 32 位窗口操作系统。该系统是为他父亲制造的一台自制电脑(“G11”)而开发的,具备多任务处理能力、受 OS/2 和 X11 启发的图形窗口系统,以及一套自定义 API,且全部能够通过单张软盘启动。
几十年后,托莱多通过编写自定义的 Am29000 模拟器成功重启了该项目。这一过程需要对 1997 年原始的软盘镜像进行大量的逆向工程,包括调试底层硬件交互、重新实现数学模拟,以及创建 Cirrus Logic GD5429 视频控制器存根。通过数千行全新的 C 代码,他恢复了该操作系统的原有功能,包括其窗口管理器、文件系统和自定义字体光栅化程序。
回顾手动编写机器码所面临的挑战,托莱多认为该操作系统是他“一生一次的成就”。目前,该模拟器、源代码以及功能完整的软盘镜像已在他的 GitHub 上发布,让用户能够亲身体验这段计算历史。
1996 年至 1998 年间,奥斯卡·托莱多(Oscar Toledo G.)开发了“Windows Fénix”,这是一个完全用机器码为 AMD Am29000 处理器编写的 32 位窗口操作系统。该系统是为他父亲制造的一台自制电脑(“G11”)而开发的,具备多任务处理能力、受 OS/2 和 X11 启发的图形窗口系统,以及一套自定义 API,且全部能够通过单张软盘启动。
几十年后,托莱多通过编写自定义的 Am29000 模拟器成功重启了该项目。这一过程需要对 1997 年原始的软盘镜像进行大量的逆向工程,包括调试底层硬件交互、重新实现数学模拟,以及创建 Cirrus Logic GD5429 视频控制器存根。通过数千行全新的 C 代码,他恢复了该操作系统的原有功能,包括其窗口管理器、文件系统和自定义字体光栅化程序。
回顾手动编写机器码所面临的挑战,托莱多认为该操作系统是他“一生一次的成就”。目前,该模拟器、源代码以及功能完整的软盘镜像已在他的 GitHub 上发布,让用户能够亲身体验这段计算历史。
每日HackerNews RSS
```Hacker News最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交登录
为 Am29000 自制计算机用机器码发掘我 1996 年的窗口化操作系统 (nanochess.org)
42 分,由 nanochess 发布于 7 小时前 | 隐藏 | 过往 | 收藏 | 2 条评论
帮助
gforce_de 38 分钟前 [–]
谢谢 Oscar - 一如既往,文笔非常非常棒 - 很值得一读!回复
nanochess 38 分钟前 | 父评论 [–]
很高兴你喜欢。这是我目前为止最长的文章,花了很多心血。谢谢!回复
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
社区准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系我们
搜索:```
盖洛普近期的一项调查显示,美国人对经济制度的看法存在显著差异。81%的人对“自由企业”持正面评价,但仅有54%的人支持“资本主义”,而支持“社会主义”的比例为39%。 美国人普遍称赞资本主义和自由企业促进了创新、竞争和个人机遇。然而,资本主义更容易与贫富差距和贪婪联系在一起。这种区别有助于解释为何自由企业享有更广泛的公众认可。与对社会主义的看法相比,在对待这两者时,党派间的分歧相对温和。 人们对社会主义的怀疑态度更为普遍;45%的美国人认为它没有任何积极属性。支持社会主义的人更看重其在经济保障和平等方面的潜力,而非经济表现。批评者则始终指出政府权力过度扩张、效率低下以及工作动力减弱等问题。 值得注意的是,年轻一代比年长一代对社会主义持更开放的态度。总体而言,调查结果表明,尽管美国人重视开放市场带来的创新和机遇,但人们(尤其是民主党人)对解决贫富差距有着浓厚兴趣,这暗示了市场对一种兼顾增长与社会公平的混合型经济模式的需求。
这篇 Hacker News 讨论帖探讨了盖洛普关于美国人对资本主义、社会主义和自由企业认知的民意调查。对话强调了这些术语在定义上存在严重的认知偏差,参与者指出,许多美国人将“社会主义”与社会福利项目或政府服务混为一谈,而非指代生产资料的公有制。
主要内容包括:
* **语义混淆:** 用户认为辩论因缺乏明确定义而受阻,并指出许多美国人所称的“社会主义”在其他国家属于资本主义与福利制度的混合体。
* **体制批判:** 一些评论者认为当前的美国体制表现为“富人的社会主义”(企业补贴)和“穷人的资本主义”(自力更生)。
* **历史背景:** 关于苏联解体是否真的“终结”了经济制度的争论依然存在。一些人认为,固守冷战时期的定义阻碍了对现代社会保障体系的建设性讨论,尤其是在自动化和人工智能威胁就业的当下。
最终,共识倾向于认为这些术语已被高度政治化,与其说是对实际经济政策偏好的反映,不如说更多是作为一种政治信号。
描述您想要的功能:“禁用模式”(AppManager 中的“冻结”)应作为默认选项。“卸载”会导致太多问题。致谢:此问题并非现有功能请求的重复。我已经选择了合适的标题。所有请求的信息均已正确提供。
最近的一场 Hacker News 讨论凸显了人们对 Android 日益收紧用户控制权的担忧。用户反映,在未获取 Root 权限的 Android 17 设备上,卸载系统应用的 `ADB uninstall` 命令已失效。
评论者对这一趋势表示不满,认为这是对“通用计算”的持续打压,并进一步削弱了用户对设备的所有权。讨论指向了关于 ADB 变更提议的一个特定问题追踪条目;许多用户担心,在缺乏 Google 合理说明的情况下,这些变更将对设备的易用性产生负面影响。整体舆论对企业不断加强对硬件的控制持深度怀疑态度,一些用户甚至讽刺地指出,这些限制标志着一种被迫的转变,即用户对个人设备已不再拥有真正的主导权。
帕累托前沿 Pareto Front
3 小时前
 **帕累托前沿**(Pareto front,或称帕累托边界)是多目标优化中的核心概念,代表了所有“帕累托最优”解的集合。在任何包含多个相互冲突目标的优化问题中,如果一个解在不损害其他目标的前提下无法改善任何一个目标,则该解被视为帕累托最优的。任何不在帕累托前沿上的选择,都会被前沿上的至少一个解所“支配”。
这一概念在工程学和经济学中至关重要,因为它使设计者和决策者能够专注于高效的权衡,而无需评估所有可能的范围。在经济学中,帕累托最优配置的一个关键特征是所有消费者的边际替代率相等。
由于计算精确的帕累托前沿往往需要巨大的计算量,研究人员会使用各种算法(例如基于 ε-近似的算法)来高效地识别或近似这些最优集。通过将注意力限制在这些高效的选择上,利益相关者能够针对必须平衡多个竞争参数的复杂系统做出明智的决策。
**帕累托前沿**(Pareto front,或称帕累托边界)是多目标优化中的核心概念,代表了所有“帕累托最优”解的集合。在任何包含多个相互冲突目标的优化问题中,如果一个解在不损害其他目标的前提下无法改善任何一个目标,则该解被视为帕累托最优的。任何不在帕累托前沿上的选择,都会被前沿上的至少一个解所“支配”。
这一概念在工程学和经济学中至关重要,因为它使设计者和决策者能够专注于高效的权衡,而无需评估所有可能的范围。在经济学中,帕累托最优配置的一个关键特征是所有消费者的边际替代率相等。
由于计算精确的帕累托前沿往往需要巨大的计算量,研究人员会使用各种算法(例如基于 ε-近似的算法)来高效地识别或近似这些最优集。通过将注意力限制在这些高效的选择上,利益相关者能够针对必须平衡多个竞争参数的复杂系统做出明智的决策。
最近的一篇 Hacker News 帖子在回复一个维基百科链接时,讨论了“帕累托前沿”(Pareto Front)这一概念——这是一个以优化和优先级排序为核心的经济学与数学原理。
评论者们对该术语提出了不同的见解:
* **优化**:一位用户指出,该术语常用于大型语言模型(LLM)的性能图表中。
* **简化**:另一位用户将其概括为简单的“优先级排序”,并建议“拒绝晦涩”。
* **题外话**:一位用户幽默地承认自己把标题误看成了“帕累托字体”(Pareto font),从而引发了一场关于“可读性最佳字体”的简短讨论,其中 PT Sans 被推荐为首选。
* **资源**:另一位用户分享了一篇将帕累托原理应用于游戏《超级马力欧兄弟》的博文。
总的来说,这次讨论突显了帕累托前沿如何作为一种基础框架,用于识别复杂系统中最有效的权衡方案。
盛冈书店 Morioka Shoten
6 小时前
森冈书店由一位前书商创立,其特色在于与实体空间之间深厚的连结。从早年在神田的经历到如今在银座的业务,森冈始终将“场所精神”(genius loci)——即建筑独特的精神与文化底蕴——视为品牌的核心要素。 在与 Takram 合作设计品牌标志时,这种对地理位置的重视依然至关重要。最终呈现的标志并非简单的图标,而是一个菱形设计,其中包含了公司名称、品牌标语以及店铺的具体地址。通过使用统一的字体并强调店铺的地理坐标,该标志捕捉了森冈“只卖一本书的书店”的愿景,确保了品牌标识与所在环境的历史意义紧密相连。
```Hacker News
最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交
登录
Morioka Shoten (takram.com)
8 分,由 skogstokig 发布于 1 小时前 | 隐藏 | 过往 | 收藏 | 1 条评论
decimalenough 7 分钟前 [–]
这种商业模式让我很着迷。无论如何,仅靠售卖单一书籍的纸质拷贝(即使/特别是如果书籍每天都在更换:那些卖不掉的库存怎么办?),根本无法覆盖银座一楼零售店的租金,更不用说还要聘请精品品牌代理机构,去为徽标和定制字体进行深度的探索设计。作为参考,日本一本标准的文库本平装书售价约为 600 日元(4 美元),如果是精装书,价格大概是其 2-3 倍。
回复
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
指南 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:```
在这篇关于 Buttondown 架构的回顾中,作者强调了为什么 Django 依然是支撑该平台成功的持久且无形的驱动力。团队没有依赖“Django 魔力”,而是利用该框架的结构构建了一个整洁、易于维护且务实的代码库。 作者总结了他们使用 Django 的五个关键支柱: * **中间件 (Middleware):** 利用简单的请求钩子处理日志记录、安全性和版本控制等横切关注点。 * **模型 (Models):** 使用自定义的 `BaseModel` 来提供 UUID 和自动变更跟踪等一致且可扩展的功能,而无需复杂的迁移。 * **动作 (Actions):** 将业务逻辑封装在单一功能的模块中,以避免臃肿的模型方法。 * **视图 (Views):** 坚持使用严格的基于函数的视图,以减少认知负担和上下文切换。 * **测试 (Testing):** 通过手动编写的、基于函数的测试固件(fixtures)而非沉重的抽象,来优先考虑测试性能。 归根结底,作者看重 Django 的灵活性,并指出他们成功地“选择性放弃”了如信号(Signals)、类视图(Class-Based Views)和 Django 表单(Django Forms)等功能,以适应他们的特定需求。通过限制“创新标记”(innovation tokens),他们保持了代码库的高迭代速度,并在 Django 的结构化可靠性与定制化的开发模式之间取得了平衡。
```Hacker News最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交登录我喜欢 Django 的原因 (buttondown.com/blog)23 点 由 j4mie 55 分钟前发布 | 隐藏 | 过往 | 收藏 | 1 条评论 帮助
stavros 6 分钟前 [–]
我同意,Django 真是太棒了。虽然没有什么是完美的,但 Django 的设计确实非常出色,各个组件自然地组合成一个平衡的整体。回复
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索: ```
![]() 这段回忆通过伦敦一家名为 Blueberry 的数字代理公司,捕捉到了 21 世纪初互联网泡沫时期那混沌而充满活力的世界。在那个人们仍使用表格布局、手写 HTML 以及推崇半透明“果冻风”(Frutiger Aero)美学的年代,作者回忆起那个更像是社交俱乐部而非办公室的工作场所。
这段叙述是一份关于逝去科技文化的怀旧剪影:举办《雷神之锤 III》局域网联机游戏,办公桌上堆满了 Iomega Zip 驱动器和 CRT 显示器,以及那种令人疯狂的网页开发节奏,甚至还带来过荒谬的福利——比如为了一个周末的加班而获得一辆经典菲亚特 500 作为报酬。从办公室里播放的鼓打贝斯(drum’n’bass)音乐,到引发记者蜂拥而至的臭名昭著的病毒式邮件风波,作者详尽描述了那个时代的巅峰与低谷。文章以 2001 年不可避免的行业衰退告终,当时公司宣告清算,员工们尽力搜救着剩余资产,这标志着数字历史上一个重要篇章的结束。
这段回忆通过伦敦一家名为 Blueberry 的数字代理公司,捕捉到了 21 世纪初互联网泡沫时期那混沌而充满活力的世界。在那个人们仍使用表格布局、手写 HTML 以及推崇半透明“果冻风”(Frutiger Aero)美学的年代,作者回忆起那个更像是社交俱乐部而非办公室的工作场所。
这段叙述是一份关于逝去科技文化的怀旧剪影:举办《雷神之锤 III》局域网联机游戏,办公桌上堆满了 Iomega Zip 驱动器和 CRT 显示器,以及那种令人疯狂的网页开发节奏,甚至还带来过荒谬的福利——比如为了一个周末的加班而获得一辆经典菲亚特 500 作为报酬。从办公室里播放的鼓打贝斯(drum’n’bass)音乐,到引发记者蜂拥而至的臭名昭著的病毒式邮件风波,作者详尽描述了那个时代的巅峰与低谷。文章以 2001 年不可避免的行业衰退告终,当时公司宣告清算,员工们尽力搜救着剩余资产,这标志着数字历史上一个重要篇章的结束。
```Hacker News最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交登录让我们在 Y2K 相聚 (gingerbeardman.com)10 分,msephton 发布于 1 小时前 | 隐藏 | 过往 | 收藏 | 1 条评论 帮助
wgx 7 分钟前 [–]
一种美好的怀旧感。邦迪蓝色的 iMac 是我在当地议会工作时的第一台办公电脑。当时我用它运行 Photoshop、Illustrator 和 QuarkXPress,制作网站、横幅广告(!)、印刷艺术品以及各种东西。即便在当时,我也记得 iMac 慢得令人痛苦。回复
考虑申请 YC 2026 年秋季批次!申请开放至 7 月 27 日。
准则 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:```
 2026年8月,开发者多米尼克·约翰(Dominik Johann)公布了《Xibalba 64》。这是一款“德军总部”风格的第一人称射击游戏,也是二十多年来首款以实体形式发行的任天堂64(N64)原创游戏。该项目由Modretro为其M64主机发行。
这款游戏是约翰将其2014年开发的JavaScript引擎“Impact”移植为C语言后的成果。为了将其带到N64平台上,他使用了开源开发套件Libdragon以及用于硬件加速图形的Tiny3D。为了克服N64众所周知的内存限制(特别是其4KB的纹理限制),他采用了定制的光线投射优化和高效的批处理渲染,以保持稳定的60帧运行。
开发过程是在真实硬件上进行的,并利用SummerCart64进行无缝调试。此外,通过跨平台架构,约翰能够在以N64硬件为目标的同时,利用SDL2/Sokol在PC上测试游戏逻辑。音频方面,包括完整的配乐在内,均通过RSP加速的VADPCM压缩进行处理,以适配32MB的卡带容量限制。
约翰强调,虽然N64开发过程复杂,但现代的自制游戏生态系统已使其变得触手可及。《Xibalba 64》作为现代独立游戏在复古硬件上运行的可行性概念验证,展示了通过社区驱动的开源库所能实现的无限可能。
2026年8月,开发者多米尼克·约翰(Dominik Johann)公布了《Xibalba 64》。这是一款“德军总部”风格的第一人称射击游戏,也是二十多年来首款以实体形式发行的任天堂64(N64)原创游戏。该项目由Modretro为其M64主机发行。
这款游戏是约翰将其2014年开发的JavaScript引擎“Impact”移植为C语言后的成果。为了将其带到N64平台上,他使用了开源开发套件Libdragon以及用于硬件加速图形的Tiny3D。为了克服N64众所周知的内存限制(特别是其4KB的纹理限制),他采用了定制的光线投射优化和高效的批处理渲染,以保持稳定的60帧运行。
开发过程是在真实硬件上进行的,并利用SummerCart64进行无缝调试。此外,通过跨平台架构,约翰能够在以N64硬件为目标的同时,利用SDL2/Sokol在PC上测试游戏逻辑。音频方面,包括完整的配乐在内,均通过RSP加速的VADPCM压缩进行处理,以适配32MB的卡带容量限制。
约翰强调,虽然N64开发过程复杂,但现代的自制游戏生态系统已使其变得触手可及。《Xibalba 64》作为现代独立游戏在复古硬件上运行的可行性概念验证,展示了通过社区驱动的开源库所能实现的无限可能。
```Hacker News
最新 | 过往 | 评论 | 提问 | 展示 | 招聘 | 提交
登录
如何在 2026 年制作一款任天堂 64 游戏 (phoboslab.org)
10 分,由 atan2 发布于 1 小时前 | 隐藏 | 过往 | 收藏 | 讨论 | 帮助
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
指南 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索:```
弗吉尼亚州公司委员会已裁定,数据中心运营商今后必须自行承担其所需的专用电力基础设施费用,此举旨在保护居民用户免受能源成本上涨的影响。弗吉尼亚州目前拥有超过 570 个数据中心,是全美数据中心最密集的地区,这些设施的迅速扩张已给电网带来了巨大压力。 州长阿比盖尔·斯潘伯格(Abigail Spanberger)支持这一决定,并预计此举可为弗吉尼亚州居民节省数亿美元。该政策要求开发商支付专供其使用的“上游”基础设施费用,如变电站和输电线路等。 此前,公众对该行业影响的担忧日益加剧。当地居民和住房权益倡导者担心,数据中心巨大的电力需求推高了公用事业账单,并加剧了住房市场的压力。尽管数据中心联盟坚称该行业运营负责且贡献了巨大经济价值,但这项新规定确保了支持基础设施升级的财政负担将由开发商承担,而非公众。
弗吉尼亚州已强制要求数据中心必须出资建设专门的电力基础设施,以支撑其运营。这一政策转变旨在确保这些高能耗设施对当地电网的贡献大于其消耗。
此公告在 Hacker News 上引发了广泛反应。支持者认为这是一种务实的对抗性举措,迫使企业对其给社区带来的资源压力承担责任;一些人甚至建议应要求这些企业投资建设新的可再生能源设施。
然而,批评者对该要求可能带来的物理影响表示担忧,认为这可能导致各地新建过多的输电塔和变电站,进而破坏当地森林和基础设施。其他人则借此讨论强调了人们对人工智能驱动的数据中心快速扩张日益增长的怀疑,质疑如果这种激进的扩张损害了当地电网的可靠性,那么其必要性何在。总的来说,这场辩论反映了科技行业的基建需求与公众在可持续性及景观利益之间日益增长的矛盾。
正在检查您的浏览器...需要启用 JavaScript。
Hacker News
最新 | 往日 | 评论 | 提问 | 展示 | 招聘 | 提交
登录
Ryg_rans 不是一个程序库 (fgiesen.wordpress.com)
3 点,由 ibobev 在 1 小时前发布 | 隐藏 | 往日 | 收藏 | 讨论 | 帮助
考虑申请 YC 2026 年秋季批次!申请截止日期为 7 月 27 日。
指南 | 常见问题 | 列表 | API | 安全 | 法律 | 申请 YC | 联系
搜索: