Status: Largely fabricated/ constructed, ESP32 carrier needs some work
A fully open-hardware robot compute unit built around a stackable 10 cm × 10 cm module standard with two Avaota A1 SIngle Board Computers (SBC) connected via a single ethernet cable.
Board A: Control & Safety
Board A is the primary controller responsible for the robot’s physical integrity and movement.
Core Tasks: ROS 2 navigation stack, topological mapping, and EKF localization.
Hardware: Direct serial link to the ESP32 (Lizard firmware) for motor control and safety watchdogs, for deterministic real-time control.
Priority: Executes real-time path planning and emergency stop logic.
Board B: Perception & AI
Board B acts as a dedicated vision processor for compute-heavy tasks.
Core Tasks: Camera drivers, image pre-processing, and neural network inference (e.g., YOLO).
Output: Processes raw video into lightweight detection coordinates or semantic labels.
Priority: High-bandwidth data handling without impacting SBC A’s CPU stability.
Native CAN bus support enables robust field-level communication. Dual GNSS RTK receivers provide centimetre-scale positioning for navigation and task execution.
All schematics, PCB layouts, and firmware are released under open licences. The system is housed in a rugged, waterproof aluminium enclosure with M12 connectors, designed for long-term outdoor deployment.
Status: Detailed BOM & concept but not yet assembled
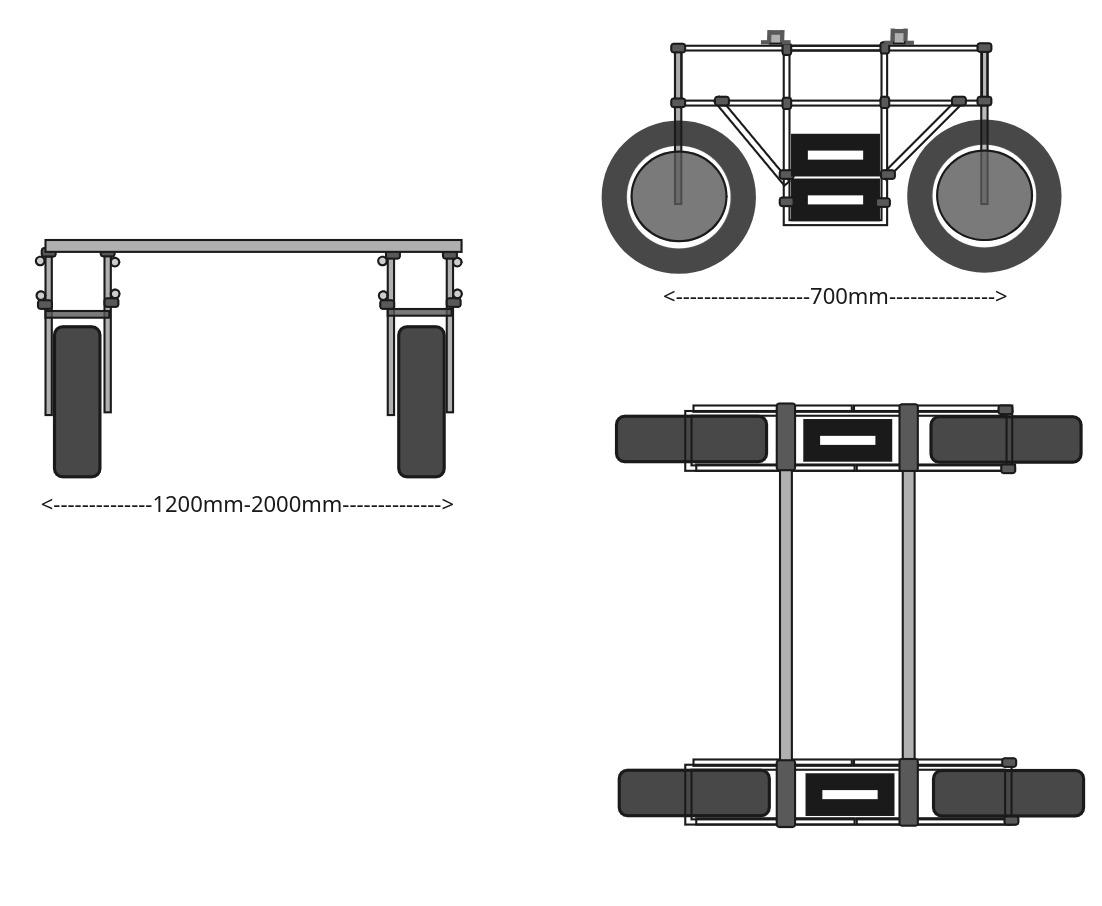
The Open core module above powers the Open AgBot reference platform. This integrates high-performance motors, precise control, long-lasting batteries suitable for Low temp <0C charging and rugged suspension into a fully modular, open-hardware agricultural robot.
Modular chassis and standardised connections enable rapid expansion and reconfiguration, providing full control over electronics, software, and mechanics for a versatile, field-ready system.
(dev platform)
Status: Needs assembly and testing
A 1/4 scale development platform for testing and validation