 该项目是在 Recurse Center 为期六周的驻留期间创作的,是一种用于设计程序化时钟的视觉化、基于节点的语言。用户可以在“织布机”(Loom)上通过连接代表向量、标量、字形和环境“栖息地”的节点来构建时钟。
该系统依赖于数学基元——利用基于时间的向量来表示小时、分钟和秒——并将其转化为圆形画布上的动态几何动画。编辑器使用 Svelte 5、TypeScript 和 p5.js 构建,特意摒弃了文字,转而采用手绘符号和印记,旨在创造一种抽象且直观的界面。
该工具的功能类似于编译器:一旦作品完成,“织布”(Weave)功能会将其渲染成一个独立的、自包含的 HTML 文件。这些导出的时钟完全基于程序生成,允许用户自定义节奏、主题和“呼吸”模式。通过操控“织布机”,设计者可以创造出独特且自定义的计时可视化效果,并完全在浏览器中运行。您可以访问 https://te-st.ing 体验该工具并导出您自己的时钟。
该项目是在 Recurse Center 为期六周的驻留期间创作的,是一种用于设计程序化时钟的视觉化、基于节点的语言。用户可以在“织布机”(Loom)上通过连接代表向量、标量、字形和环境“栖息地”的节点来构建时钟。
该系统依赖于数学基元——利用基于时间的向量来表示小时、分钟和秒——并将其转化为圆形画布上的动态几何动画。编辑器使用 Svelte 5、TypeScript 和 p5.js 构建,特意摒弃了文字,转而采用手绘符号和印记,旨在创造一种抽象且直观的界面。
该工具的功能类似于编译器:一旦作品完成,“织布”(Weave)功能会将其渲染成一个独立的、自包含的 HTML 文件。这些导出的时钟完全基于程序生成,允许用户自定义节奏、主题和“呼吸”模式。通过操控“织布机”,设计者可以创造出独特且自定义的计时可视化效果,并完全在浏览器中运行。您可以访问 https://te-st.ing 体验该工具并导出您自己的时钟。
每日HackerNews RSS
**Claude for Foundation Models** Swift 软件包(目前处于测试阶段)允许开发者将 Anthropic 的 Claude 模型直接集成到 Apple 原生的 `Foundation Models` 框架中。 通过遵循 Apple 的 `LanguageModel` 协议,该软件包使开发者能够使用标准的 `LanguageModelSession` API 来处理流式传输、工具调用和引导生成等任务。由于请求直接发送至 Claude API,Apple 不会参与数据路径,且使用费用将通过开发者的 Anthropic 账户结算。 **主要功能包括:** * **无缝集成:** 只需更换模型实例,即可在 Apple 的端侧模型与 Claude 之间进行切换。 * **支持功能:** 包含服务器端工具(网页搜索、代码执行)、结构化输出和视觉能力等功能。 * **安全性:** 支持生产环境的代理身份验证模式,防止 API 密钥在客户端二进制文件中泄露。 * **错误处理:** 将 Claude API 错误映射为 Apple 原生的 `LanguageModelError` 类型,从而实现一致的错误管理。 该软件包提供了一个高级且标准化的接口,在利用 Apple 原生开发模式的同时发挥前沿推理能力。它适用于 iOS、macOS、visionOS 和 watchOS 27(测试版)。
苹果在最新的操作系统更新中发布了一个全新的“基础模型”(Foundation Models)框架。它提供了一套统一的 Swift API,允许开发者使用相同的代码,在本地端侧 AI 模型与 Anthropic(Claude)或谷歌(Gemini)等云端服务提供商之间灵活切换。
Hacker News 上的讨论主要集中在以下几个核心观点:
* **商品化与控制权:** 许多人认为这是苹果的一种策略,旨在将大语言模型(LLM)商品化,同时保留对用户体验(UX)的控制。通过创建一个抽象层,苹果确保了开发者不会被绑定在某一家单一的 AI 提供商上,这也让苹果未来能够轻松替换或优先推广自家的模型。
* **架构效率:** 该框架允许开发者将简单任务路由至本地模型(以节省成本并保护隐私),将复杂任务交给云端模型。这种“相同代码,不同成本模型”的方法简化了开发流程,但也引发了对苹果生态系统依赖性的担忧。
* **硬件雄心:** 评论者讨论了苹果“最适合 AI 的设备”这一营销宣传究竟是现实还是局限,并指出目前的本地模型在规模和能力上仍远逊于云端的“前沿”模型。
* **开发者顾虑:** 开发者们仍对计费复杂性、API 密钥管理难度以及使用第三方代理时的隐私影响持怀疑态度。
Dalus 正在为系统工程师构建一个现代化的 AI 驱动平台,服务于那些设计火箭、卫星、防御系统和电动汽车的专业人士。我们致力于取代该行业沿用了数十年的笨重桌面工具。 我们正在招聘一名专注于前端的高级软件工程师。你将全面负责产品的界面,并为产品的视觉和交互体验设定标准。核心挑战在于:如何将密集且复杂的工程数据转化为直观易用的界面。 你: * 中级至高级工程师,至少 5-8 年工作经验。 * 具备卓越的 UI/UX 品位和扎实的 React 技能。 * 曾为真实用户构建过精良的界面。 * 能够在小团队中自主负责前端工作。 * 有初创公司经验者优先。 * 常驻德国或 DACH 地区;慕尼黑优先。会德语者更佳。 * 加分项:具备工程、技术或开发者工具相关开发经验。 这是一个早期阶段、高主导权的角色。你将直接与创始人共事,从零开始塑造产品。
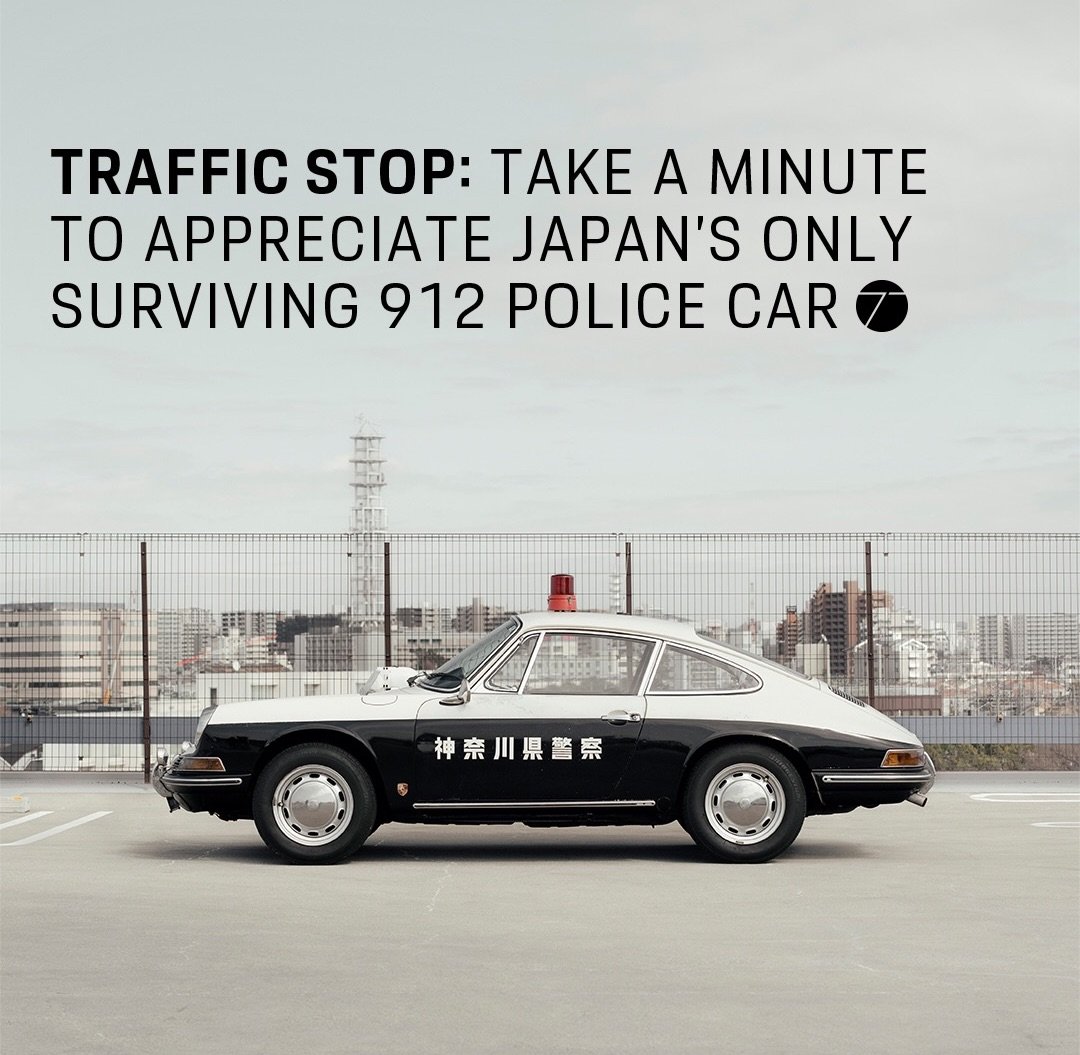 哇,真是个美人。20世纪60年代,四辆保时捷 912 被改装成了日本警车。这辆在神奈川服役至 1973 年的车辆是目前仅存的一辆(即便如此,它也经历了翻新)。这辆日本警用 912 于 1968 年至 1973 年在神奈川县服役,负责第三京滨道路和东名高速公路的巡逻。在五年的服役期间,它行驶了超过 15.5 万公里,甚至还曾拦截过一辆时速 178 公里的超速车辆。
警用车辆在服役期满后通常会被报废,但这辆车是个例外。因发动机故障退役后,它在警察学校被保存并展出了 26 年。随着时间的推移,风吹日晒导致车辆严重损坏,1999 年它被卖到了废车场。经过六个月的协商,这辆车最终被寻回。以下是几张当年 912 服役时的照片。
哇,真是个美人。20世纪60年代,四辆保时捷 912 被改装成了日本警车。这辆在神奈川服役至 1973 年的车辆是目前仅存的一辆(即便如此,它也经历了翻新)。这辆日本警用 912 于 1968 年至 1973 年在神奈川县服役,负责第三京滨道路和东名高速公路的巡逻。在五年的服役期间,它行驶了超过 15.5 万公里,甚至还曾拦截过一辆时速 178 公里的超速车辆。
警用车辆在服役期满后通常会被报废,但这辆车是个例外。因发动机故障退役后,它在警察学校被保存并展出了 26 年。随着时间的推移,风吹日晒导致车辆严重损坏,1999 年它被卖到了废车场。经过六个月的协商,这辆车最终被寻回。以下是几张当年 912 服役时的照片。
curl 项目宣布了一个“幸福之夏”计划,期间团队将暂停处理安全漏洞报告。从 2026 年 7 月 1 日 00:00 CEST 起至 2026 年 8 月 3 日 09:00 CEST,所有通过 HackerOne 和项目安全邮箱提交的漏洞报告都将被暂停受理或忽略。 此举旨在让维护者从近几个月的高强度压力中抽身,进行休息并专注于非紧急开发工作。因此,8.22.0 版本的发布已推迟至 2026 年 9 月 2 日。 尽管安全报告渠道将关闭,但项目的 GitHub Issue 和 Pull Request 跟踪器仍将保持开放和活跃。请注意,上述限制不适用于拥有付费支持合同的用户,他们将继续获得全面服务。curl 团队鼓励其他开源项目考虑采取类似的休息方式,以优先保障维护者的身心健康。
curl 项目宣布在 2026 年 7 月期间将不接受任何漏洞报告,相当于在常规安全维护工作中暂停一个月。这一决定被视为维护人员应得的暑期休假,却在 Hacker News 上引发了关于开源可持续性、工作与生活平衡以及企业责任的热烈讨论。
此次辩论的核心要点包括:
* **支持合约**:该项目明确表示,拥有付费支持合约的用户将继续获得服务。此举旨在鼓励企业为开源维护提供资金支持。
* **可持续性**:支持者认为,倦怠是开源领域的一个严峻问题,不应期望维护人员免费提供全天候、全年度的紧急支持。
* **文化视角**:许多评论者将美国“全天候”的工作文化与欧洲规范进行了对比,在欧洲,为期一个月的暑假是标准且被社会所接受的。
* **安全担忧**:批评者担心,即使是暂时忽略漏洞报告,也可能导致关键系统面临风险。然而,许多人反驳称,行业过度依赖个人维护者,而应更多关注下游补丁、沙盒机制以及由企业主导的支持体系。
归根结底,这场讨论反映了基础数字设施的“免费”属性与维护其所需的实际成本之间日益加剧的矛盾。
在本期《CrowdScience》节目中,主持人卡罗琳·斯蒂尔(Caroline Steel)探讨了为何纸张能独特地保持折痕,这一特性使其成为复杂折纸艺术的理想材料。受一位听众关于折叠布餐巾与纸张难易度差异的启发,节目组深入调查了这种材料的结构奥秘。 探索之旅始于全球首家机械化造纸厂弗罗格莫尔(Frogmore),斯蒂芬·曼(Steven Mann)博士在此讲解了纸张可折叠性背后的化学原理与制造工艺。节目组还与折纸专家仓田敏子(Toshiko Kurata)共同研究了不同纸张的表现,并由比尔·桑普森(Bill Sampson)教授从微观层面解析了其内部结构。最后,节目展示了该工艺的前沿进展,介绍了馆洋(Tomohiro Tachi)教授及其创新软件“Origamizer”,该软件拓展了复杂纸张几何学的边界。
最近的一场 Hacker News 讨论探讨了折纸背后的物理学与几何学。起因是人们观察到,折叠一张纸能产生一条完美的直线——这是一种无需外部工具即可生成直边的直观且高效的方法。
参与者指出,这种现象主要是因为纸张抗拉伸但易弯曲,从而能够形成精确的几何折痕。这一特性非常可靠,甚至衍生出了几何公理系统(如藤田-羽鸟公理),能够解决传统尺规作图无法完成的问题,例如三等分角。
讨论还延伸到了几个相关的趣点:
* **与其他工具的比较:** 虽然建筑中常用墨线,但它会受到悬链线垂度(catenary sag)的影响(不像纸张折痕那样笔直)。
* **材料特性:** 折叠的难易程度取决于材料的刚度和纤维构成,这解释了为什么薄纸或金属箔能折出清晰的折痕,而其他材料则不然。
* **实用力学:** 除了几何学,用户还讨论了纸张与水分的相互作用及其惊人的密度——指出纸张在水中会下沉,因为其亲水性纤维排开了内部的空气。
Anthropic 在发布其“Fable”模型后正面临审查。该模型是其“Mythos”人工智能的一个版本,而 Anthropic 此前曾认定 Mythos 为一种危险的网络武器。尽管 Anthropic 曾倡导对 Mythos 进行严格监管,但一位受信任的合作伙伴近期发现了一个可以绕过 Fable 安全护栏的越狱漏洞。 美国政府要求 Anthropic 要么修复此漏洞,要么将该模型下架。Anthropic 拒绝了这一要求,并公开称该越狱漏洞无关紧要。美国政府认为这是一个重大的安全风险,随即便对该模型实施了出口管制。 这一应对措施与其既定的“人工智能安全”品牌形象形成了鲜明对比。政府官员对该公司拒绝处理其此前承认至关重要的安全漏洞感到不解。政府表示仍重视 Anthropic 的技术能力,并希望问题能尽快解决。在安全隐患消除之前,出口管制将持续有效,这也明确了 Anthropic 必须将安全置于商业部署之上的责任。
抱歉。
请提供您需要翻译的内容。
 本文是介绍 Emacs 实用、冷门且“开箱即用”功能的系列文章的第三篇,旨在为资深用户提供参考。文章特意避开了热门插件,专注于那些几乎无需配置、学习曲线平缓的内置功能。
文中重点介绍了以下特性:
* **词典与搜索:** 使用 `dictionary-tooltip-mode` 即时查看释义,利用 `ffap-menu` 列出缓冲区内的所有文件路径或 URL。
* **文件管理:** 在 `find-file` 和 `dired` 中使用通配符进行批量操作,以及利用 `dired-compare-directories` 进行高级的文件级比对。
* **差异比对与追踪:** 使用 `compare-windows` 进行简单的并排文本差异比对,通过 `highlight-changes-mode` 可视化修改内容。
* **生产力工具:** `ruler-mode` 用于视觉布局调整,`refill-mode` 用于自动段落换行,`emacs-lock-mode` 用于防止误删缓冲区。
* **导航与定制:** 扩展 `apropos` 系列命令以更轻松地发现功能,使用 `find-function-on-key` 直接跳转到函数源码。
作者强调,虽然这些工具较为冷门,但它们无需外部依赖即可显著提升工作流效率,这也证明了只要深入挖掘,Emacs 的内置库依然蕴含着惊人的潜力。
本文是介绍 Emacs 实用、冷门且“开箱即用”功能的系列文章的第三篇,旨在为资深用户提供参考。文章特意避开了热门插件,专注于那些几乎无需配置、学习曲线平缓的内置功能。
文中重点介绍了以下特性:
* **词典与搜索:** 使用 `dictionary-tooltip-mode` 即时查看释义,利用 `ffap-menu` 列出缓冲区内的所有文件路径或 URL。
* **文件管理:** 在 `find-file` 和 `dired` 中使用通配符进行批量操作,以及利用 `dired-compare-directories` 进行高级的文件级比对。
* **差异比对与追踪:** 使用 `compare-windows` 进行简单的并排文本差异比对,通过 `highlight-changes-mode` 可视化修改内容。
* **生产力工具:** `ruler-mode` 用于视觉布局调整,`refill-mode` 用于自动段落换行,`emacs-lock-mode` 用于防止误删缓冲区。
* **导航与定制:** 扩展 `apropos` 系列命令以更轻松地发现功能,使用 `find-function-on-key` 直接跳转到函数源码。
作者强调,虽然这些工具较为冷门,但它们无需外部依赖即可显著提升工作流效率,这也证明了只要深入挖掘,Emacs 的内置库依然蕴含着惊人的潜力。
这场 Hacker News 讨论探讨了 Emacs 持久的魅力、复杂性及其持续演进的过程。
贡献者们认为,Emacs 不仅仅是一个文本编辑器,更是一个深度可扩展的平台——一个能够根据用户特定需求进行塑造的 Lisp 解释器。虽然资深用户赞赏 `org-mode`、`magit` 以及卓越的文本处理能力等功能,但新手往往面临着陡峭的学习曲线。
讨论的很大一部分集中在“内置电池”式的发行版(如 Doom 或 Spacemacs)与“原生(vanilla)”设置之间的稳定性之争。许多用户指出,复杂的第三方框架在更新时容易出现故障,因此一些人主张构建自定义配置以确保长期的可靠性。
对话还强调了 Emacs 与人工智能的交集。一些高级用户正成功地集成大语言模型(通过 `gptel` 等工具)来排除故障、自动化操作并重构其配置。尽管有人认为这种做法容易产生幻觉,但另一些人则认为,通过 AI 代理来“驾驶” Emacs 实例是生产力的一次变革性飞跃。归根结底,用户们一致认为,虽然 Emacs 可能并不适合所有人,但其在内省和个人定制方面的能力依然无与伦比。
《塞罗托雷峰简史:最具争议的山峰(2012)》 A short history of Cerro Torre, the most controversial mountain (2012)
11 天前
 托雷峰(Cerro Torre)是一座海拔 3,128 米的山峰,坐落于智利与阿根廷边境,至今仍是世界上最具争议的山峰。其历史因意大利登山家切萨雷·马埃斯特里(Cesare Maestri)而蒙上阴影,他声称于 1959 年首次登顶,但这一说法广受质疑。1970 年,马埃斯特里重返此地,开辟了“压缩机路线”(Compressor Route),他使用汽油动力钻机安装了数百个永久性岩钉,此举被纯粹主义者斥为“从未来手中窃取山峰”。
2012 年,随着美国登山家海登·肯尼迪(Hayden Kennedy)和贾森·克鲁克(Jason Kruk)在无需岩钉的情况下快速登顶,并在下山途中拆除了马埃斯特里留下的 125 个岩钉,这场辩论达到了白热化。他们的单方面行动引发了全球愤慨,并点燃了关于登山“公平手段”的激烈争论:这些路线究竟应作为历史遗迹予以保留,还是应通过“解放”来恢复山峰最初的挑战难度。
批评者认为,拆除行为是傲慢的破坏,限制了技术较弱登山者的进入机会;而支持者则将其视为恢复道德纯洁性的无私之举。这场争议凸显了登山伦理的主观性。如今,托雷峰已被随后的自由攀登壮举进一步“解放”,其留给后世的遗产正如其锯齿状的岩壁一样,复杂且充满争议。
托雷峰(Cerro Torre)是一座海拔 3,128 米的山峰,坐落于智利与阿根廷边境,至今仍是世界上最具争议的山峰。其历史因意大利登山家切萨雷·马埃斯特里(Cesare Maestri)而蒙上阴影,他声称于 1959 年首次登顶,但这一说法广受质疑。1970 年,马埃斯特里重返此地,开辟了“压缩机路线”(Compressor Route),他使用汽油动力钻机安装了数百个永久性岩钉,此举被纯粹主义者斥为“从未来手中窃取山峰”。
2012 年,随着美国登山家海登·肯尼迪(Hayden Kennedy)和贾森·克鲁克(Jason Kruk)在无需岩钉的情况下快速登顶,并在下山途中拆除了马埃斯特里留下的 125 个岩钉,这场辩论达到了白热化。他们的单方面行动引发了全球愤慨,并点燃了关于登山“公平手段”的激烈争论:这些路线究竟应作为历史遗迹予以保留,还是应通过“解放”来恢复山峰最初的挑战难度。
批评者认为,拆除行为是傲慢的破坏,限制了技术较弱登山者的进入机会;而支持者则将其视为恢复道德纯洁性的无私之举。这场争议凸显了登山伦理的主观性。如今,托雷峰已被随后的自由攀登壮举进一步“解放”,其留给后世的遗产正如其锯齿状的岩壁一样,复杂且充满争议。